Selected Research
Mid-Air Locomotion & Spatial Cognition
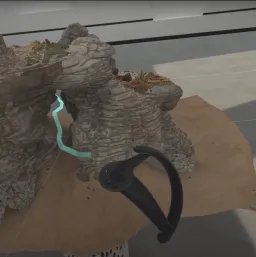
I am using eye tracking data to assess the cognitive workload of one-handed and two-handed path creation techniques, and to estimate the cognitive workload of mid-air locomotion techniques with varying degrees of freedom. To ensure accurate pupillometry data, I calculate the luminosity of the HMD in real-time on compute, then use an individualized pupillary light reflex (PLR) function to correct for this response.Under Review
SPATIAL COGNITION // LOCOMOTION
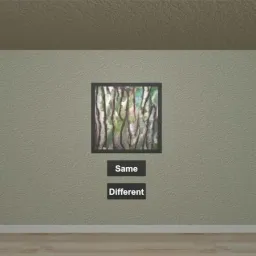
3D User Interfaces for Mixed Reality Path Planning
In two user studies, I explored intuitive methods for creating intricate 3D paths in complex spaces for augmented and virtual reality. I designed multiple 3D user interfaces for novice users, and examined the efficacy and learnability of one-handed and two-handed techniques using quantitative metrics adapted from 2D user interface research. SPATIAL COGNITION // 3D INTERACTION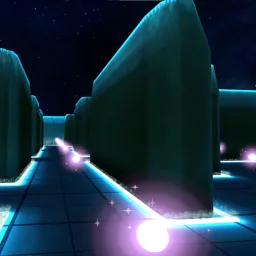
VR Arcade Game
This began as an experimentation with different locomotion techniques and reference frames for virtual reality, and developed into a riff on the classic Pac-Man arcade game. I developed it in Unity with OpenXR for both Vive and Oculus devices. All of the interactions were implemented from the ground up for flexibility. PERSONAL PROJECTS // 3D INTERACTION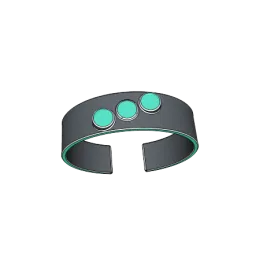
ReMind: Wearable for Emotional Awareness
Through a participatory design process, I examined the challenges faced during the later stages of addiction recovery and developed a wearable prototype, ReMind, to help develop emotional awareness and literacy. EMBODIED INTERACTION // COMMUNITY-DRIVEN DESIGN